Collision-free dynamic window approach for moving obstacles
Inventor (s): Zhimin Xi
Date Awarded: May 2023
Summary:
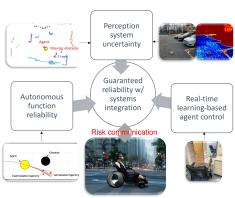
Our project focuses on developing a unique, reliable autonomous wheelchair navigation system that addresses the limitations of the dynamic window approach (DWA) for collision avoidance. Our solution integrates system-level improvements, considering the uncertainty of perception systems and implementing a novel approach to avoid collisions with moving objects.
The technology aims to reduce wheelchair falls, tipping incidents, and collisions for users with varying degrees of physical disability, including those with paralysis or quadriplegia who find existing controls like joysticks or sip-and-puff devices challenging to use. Our participation in the National I-Corps Program and market research indicate a strong demand for safer wheelchair navigation solutions.
Upon market release, this innovative, reusable technology will provide a competitive edge over current alternatives and cater to the needs of a large potential user base. It will be important not only for wheelchair users but also has the potential to be adapted for other applications, such as moving robots, drones, and autonomous forklift trucks, opening up unlimited opportunities in various industries.
Market applications:
- Autonomous wheelchair navigation
- Hands-free control for individuals with paralysis or quadriplegia
- Enhanced safety features for manual and powered wheelchairs
- Collision avoidance for moving robots in various industries
- Autonomous navigation for drones
- Smart navigation for autonomous forklift trucks in warehouses and factories